La multinacional tecnológica GMV ha completado las pruebas de validación en tierra de un robot espacial para ensamblaje de estructuras en órbita terrestre, en el marco del proyecto MIRROR (Multi-arm Installation Robot for Readying ORUS and Reflectors) de la Agencia Espacial Europea (ESA). Las pruebas tuvieron lugar en las instalaciones de GMV en Tres Cantos (Madrid), en Platform-art, laboratorio robótico de GMV que permite simular algunas de las condiciones que el robot encontrará en futuras misiones espaciales.
La robótica espacial ha sido identificada por los principales actores espaciales europeos y mundiales, como una tecnología clave para el futuro del sector. Tanto la Agencia Europea del Espacio (ESA), como la Comisión Europea (CE), están financiando múltiples desarrollos relacionados con tecnologías de robótica orbital, con la vista puesta en la creación de un ecosistema de cohetes, logística orbital y complejos sistemas robóticos que permitan una presencia y sucesiva explotación del espacio limpia y sostenible en el tiempo.
GMV desarrolla sistemas y tecnología para estas aplicaciones espaciales, entre otras. Un ejemplo son los sistemas robóticos para servicio en órbita, cuyo fin es reparar, mantener, mejorar o repostar satélites en el espacio para alargar su vida útil, ensamblar nuevas plataformas orbitales de gran tamaño como antenas, huertos solares espaciales o telescopios, o retirar satélites al final de su vida útil para evitar la acumulación de peligrosa basura espacial alrededor de la tierra.
Proyecto MIRROR
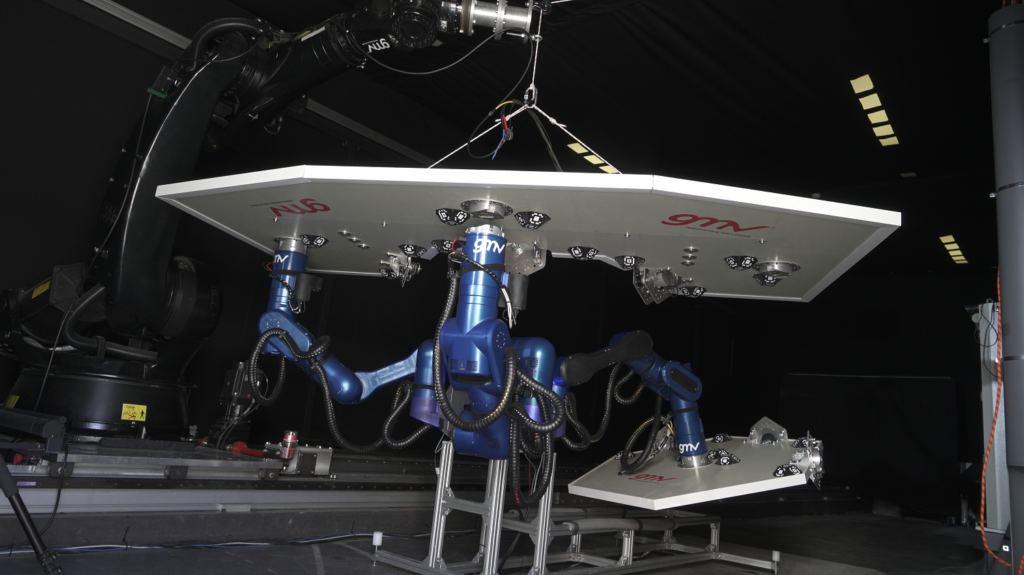
En este contexto, y dentro del proyecto MIRROR liderado por GMV para la ESA, GMV ha desarrollado y probado una plataforma robótica de última generación, un robot autónomo con tres brazos que usa tanto para manipular y ensamblar módulos estructurales como para caminar por la estructura que está ensamblando. Este número de brazos le permite desplazarse con dos de ellos, mientras usa el tercero para transportar un módulo hasta su punto de ensamblaje. Esta característica única le permitirá montar grandes estructuras, sin limitaciones de tamaño. Para realizar estas operaciones, MIRROR cuenta con un preciso sistema visual compuesto por cámaras instaladas cerca de las garras en cada uno de los brazos, y algoritmos de procesamiento de imagen. Sus tres garras le permiten no sólo manipular módulos y caminar, sino también recibir energía, comunicarse y usar herramientas para montaje (similares a destornilladores, por ejemplo).
Todas estas características hacen de MIRROR un sistema muy versátil, capaz de abrir la puerta a nuevas aplicaciones en las que hay un creciente interés por parte de las principales agencias espaciales y de la industria aeroespacial, pero que hasta ahora no habían sido posible ni técnica ni económicamente. Una de estas aplicaciones es la generación de electricidad en órbita para uso en tierra mediante paneles solares fotovoltaicos. Tales estaciones tendrían un tamaño aproximado de un kilómetro, producirían electricidad de manera continua las 24 horas del día y transmitirían la electricidad generada mediante microondas a una antena receptora de gran tamaño instalada en tierra.
Otra aplicación en la que hay un gran interés son los telescopios de gran tamaño para investigación del cosmos, cuyas prestaciones aumentarían enormemente al aumentar su tamaño a las decenas de metros. La creación de grandes plataformas orbitales, en las que los operadores de telecomunicaciones puedan instalar y mantener fácilmente sus equipos son una aplicación más en la que hay un creciente interés.
En una primera fase del proyecto MIRROR se definieron las características de la estructura a ensamblar (el reflector de un telescopio como primer caso de uso), así como los requisitos funcionales de los componentes, sus requisitos operativos y de prueba. Posteriormente, GMV y sus empresas colaboradoras, entre estas la Italiana LEONARDO, diseñó el brazo MIRROR capaz de cumplir con los requisitos propuestos, en particular la movilidad, la capacidad para transportar módulos y la precisión de ensamblaje. Para ello, fue necesario una evolución de todos los subsistemas involucrados: actuadores, sistema de potencia, garras, así como la ejecución de varias simulaciones para garantizar que el robot sea capaz de manejar módulos de suficiente tamaño (alrededde control, con el objetivo de automatizar todo el proceso de ensamblaje. El or de 1.2 metros). Además, GMV ha desarrollado un avanzado subsistema semiautónomo objetivo principal del sistema de control es garantizar que el robot pueda moverse y ensamblar módulos a pesar de la incertidumbre en la posición de los puntos de agarre, e incluso detectar los fallos que se puedan producir y reintentar las operaciones en caso de fallo. El proyecto incluye maquetas de la estructura a ensamblar en las pruebas, así como un centro de control, con el cual es posible comandar el robot usando distintos niveles de autonomía (desde la teleoperación hasta el envío de comandos autónomos, como por ejemplo, ensamblar un módulo en un punto determinado de la estructura).
Actualmente, GMV ha completado las pruebas de validación con el demostrador en su laboratorio robótico Platform-art®, en el que se simulan las condiciones de iluminación en órbita. Este laboratorio también cuenta con equipos que permiten simular parcialmente las condiciones de ingravidez. Las pruebas se han completado con éxito, demostrando que el concepto es viable, lo que permitiría comenzar una nueva fase de desarrollo para demostrar las mismas operaciones en pruebas reales en órbita terrestre.
Además del proyecto MIRROR, GMV es líder de otros proyectos de robótica espacial en el marco de la ESA, como el European Moon Rover System, RAPID, o de la Comisión Europea (PERASPERA): desarrollo del sistema operativo para el control de robots espaciales (proyecto ESROCOS) o del sistema de autonomía o inteligencia artificial (proyecto ERGO).
Fuente: El mundo financiero


